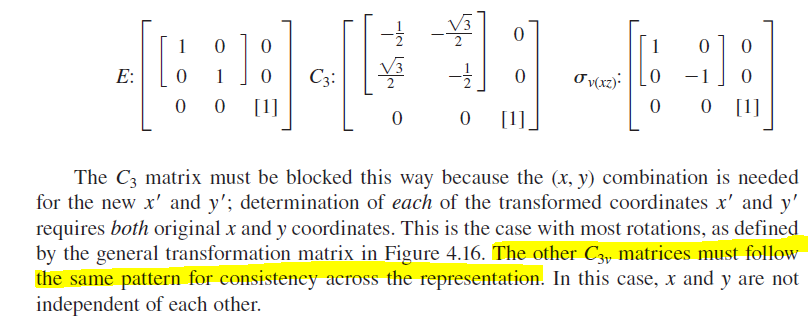
Я так полагаю здесь подразумевается следующее. У C_{3v} группы есть основная ось: C_3. Оси координат выбираются случайно. Вы можете задать такую координатную плоскость, что C_3 будет совпадать с осью z (делается чаще всего и в т.ч. в данном случае), y, x, или вообще ни с одной из них.
И ключевое – как только вы выбрали координатную плоскость, вы должны все операции симметрии расписывать в ней. Поскольку мы выбрали C_3 ось как совпадающую с z, C_3^2 тоже будет совпадать с z, а значит тоже будет менять координаты только (x, y), а значит будет иметь вид:
\begin{bmatrix}
A & 0 \\
0 & B
\end{bmatrix}
где A – матрица 2\times2, а B – матрица 1\times1.
Речь о том, что C_3^2 не будет выглядеть (с теми же обозначениями), как, например:
\begin{bmatrix}
B & 0 \\
0 & A
\end{bmatrix}
Юмор
или (боже упаси)
\begin{bmatrix}
A & B \\
B & B
\end{bmatrix}
4 лайка