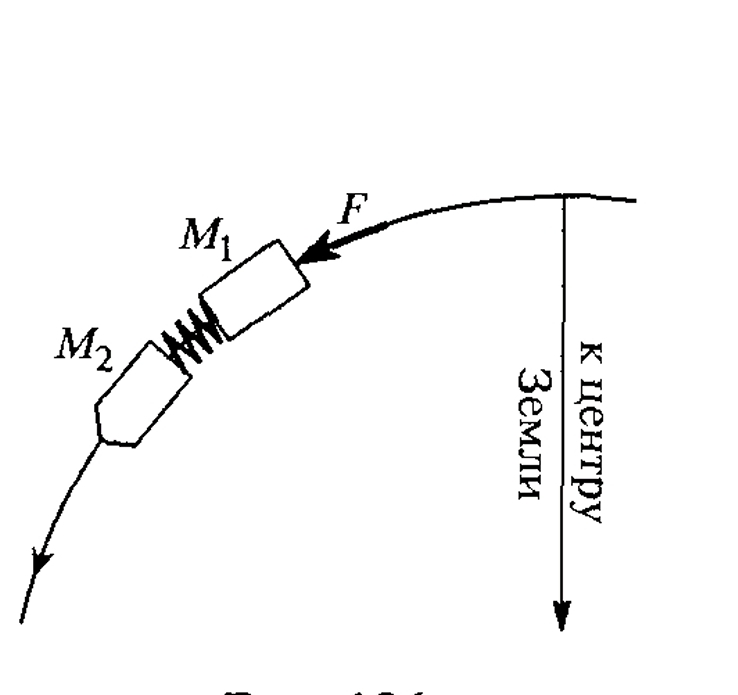
7.107. Спутник Земли состоит из двух масс M1 и M2 соединен-
упругой конструкцией длины хо жесткости k (рис. 136). Для
перехода на новую орбиту включается двигатель с постоянной силой
тяги F, связанный с массой М1, в результате чего возникают коле-
бания системы. В какой момент и как надо изменить силу тяги, что-
бы погасить возникшие колебания? Как изменится при этом рас-
стояние между М1 и M2?
Помогите ожалуйста с идеей, ВОТ все что я понял:
1)нужно поменять силу тяги во время того когда в процессе колебаний наступит положение в амплитуде,в которой массы сблизятся на мкасимальное расстояние.Тогда у нас нету скорости относительно тел относительно друг друга в системе отсчета центра масс (dx/dt=0) и наша пружинка не растягивается.
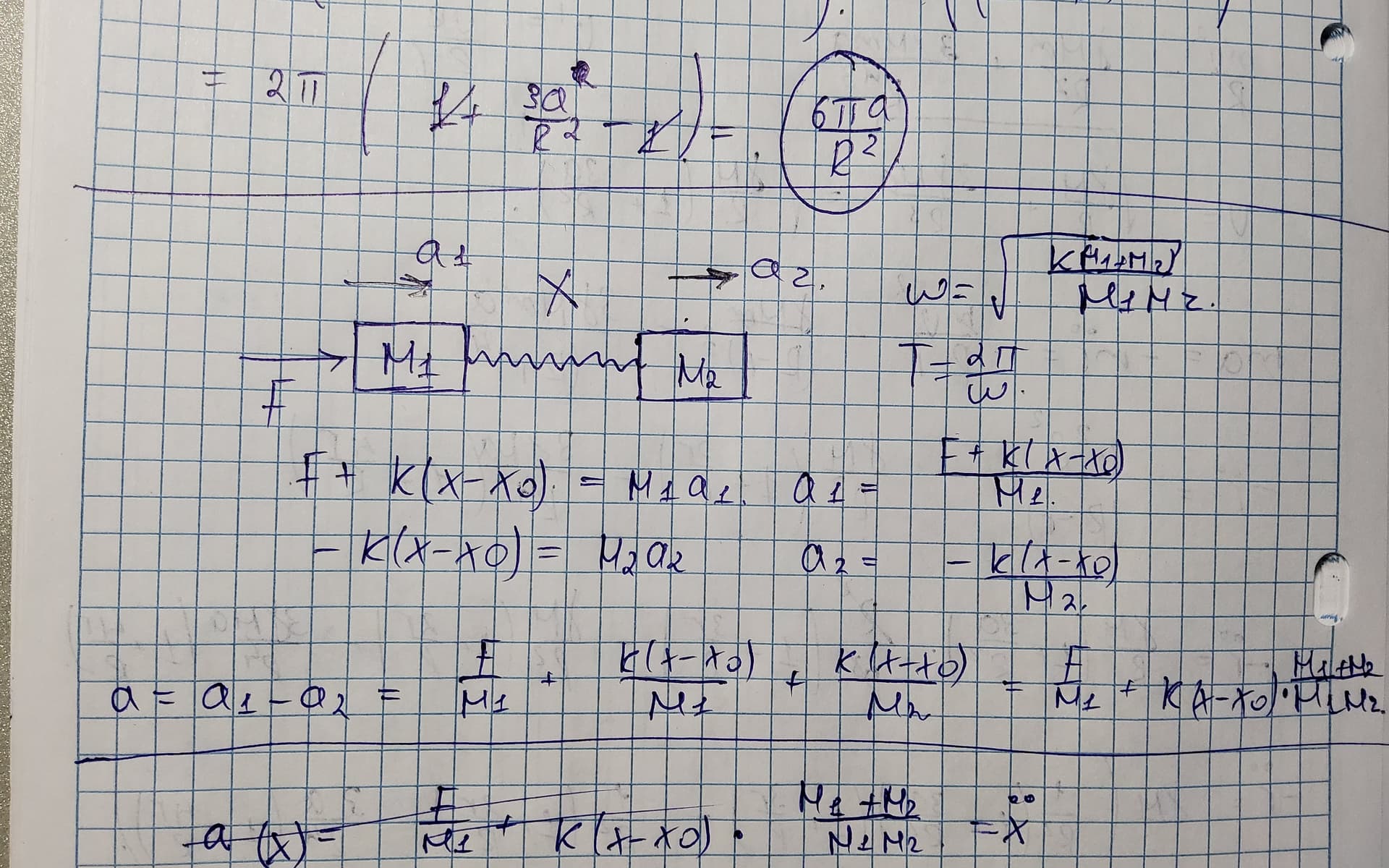
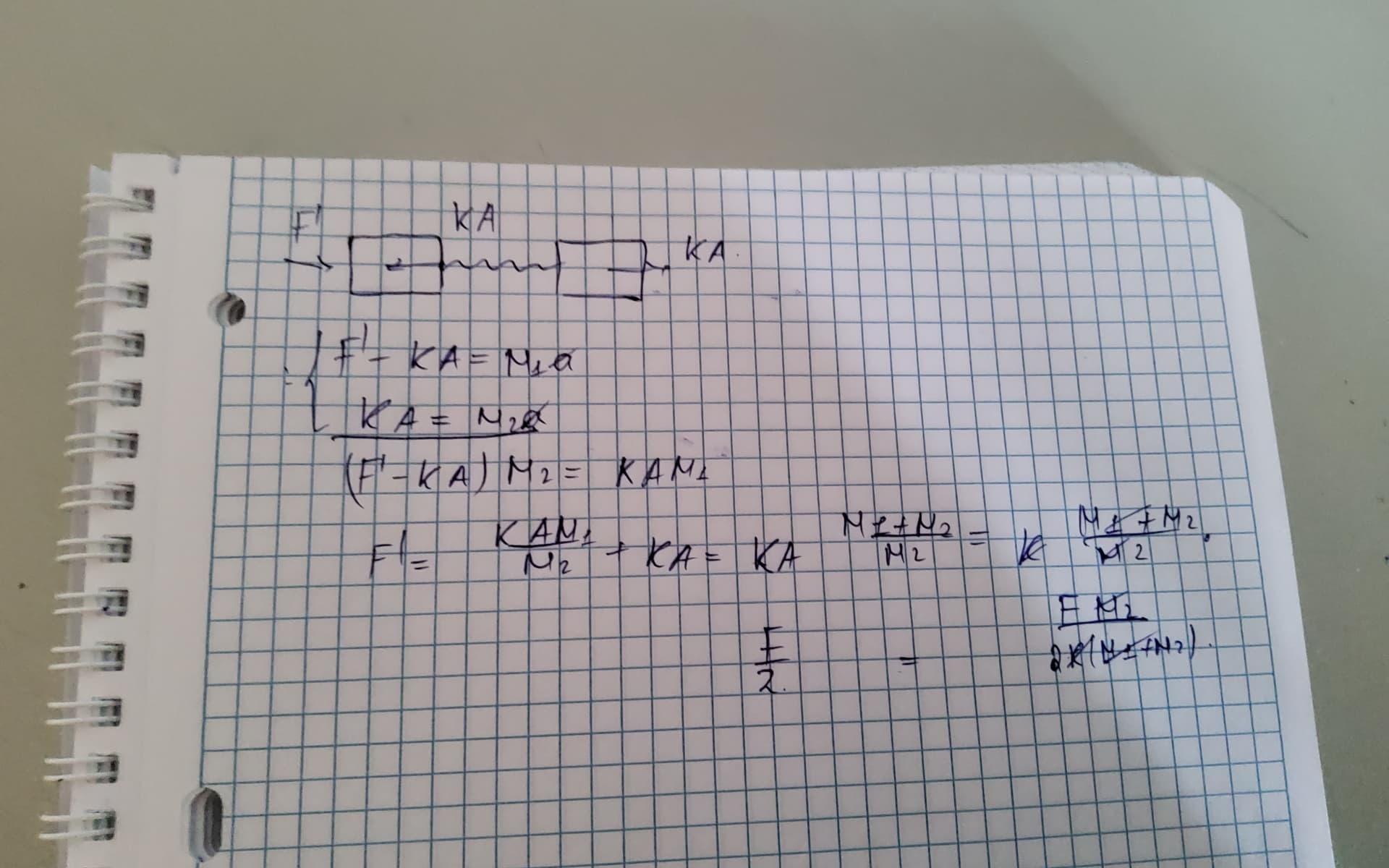
2)F’-kdx=M1a
kdx=M2a
где “а” ускорение центра масс системы
3)с системы уравнений выше выражаем F’
4)нам нужно найти амплитуду системы колебаний,для чего мы можем использовать изменение энергии dA(тяги)=dE,но для этого придется учитывать изменение потенциальной энергии гравитационного поля Земли,но не понятно на какой высоте (орбите) находились етла в начале и в конце,даже закн сохранения момента импульса писать тяжко
5)думаю можно решить через динамику и дифферинцирование и т.д. НО я незнаю как)
6)На заметку w=sqrt(k/M)
where M=M1M2/(M1+M2)
один из путей для нахождения амплитуды это записать уравнение движения одного тела относительно другого, решить это уравнение и найти значение в момент времени t=T/2
x_{12} это смещение первого тела относительно второго.
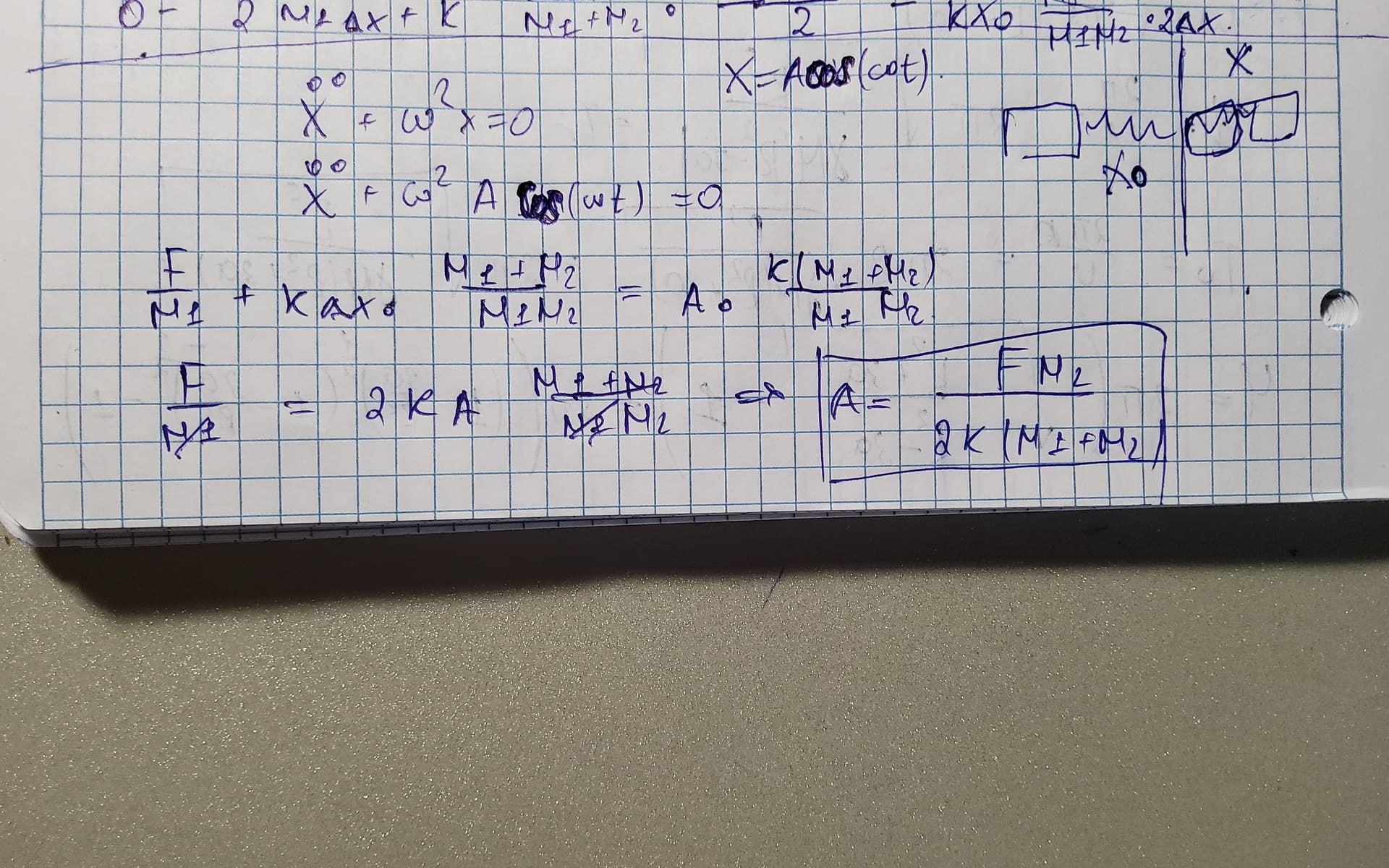
решение этого уравнения имеет вид
x_{12} (t)= \frac{F}{m_1ω²} + A\cos{(ωt+φ)}
A и φ ты найдешь из начальных условий (x_{12}(0), \dot{x}_{12}(0))
причем A это не есть удлинение через полпериода. нам нужно найти именно удлиннение пружины x_{12}(\frac{π}{ω})
если найдешь и подставишь в систему на нижней фотографии, должно получиться
когда у тебя есть какая то дополнительная постоянная сила, то у тела появляется новое положение равновесия x_0, относительно которого оно колеблется. например в поле тяжести тело, подвешенное на пружине колеблется относительно положения kx_0=mg => x_0=mg/k
в этой же задаче у первого тела тоже появилось новое положение равновесия относительно второго. если изначально оно было равно длине недеформированной пружины, то после приложения силы оно стало равно \frac{F}{m_1ω²}